
引言
伴随大规模的页岩气勘探开发, 压裂作业需要大排量压裂液携带砂粒泵注到井下。连续混配设备直接在施工现场配制压裂液, 形成高黏度的水粉混合压裂液, 能在 3 min 以内完成压裂液混配, 并且可以根据需要现场调整配方, 残液少, 有效节省运输成本, 提高压裂液质量, 满足了大型压裂井场工厂化连续施工的要求,为页岩气大规模开发压裂施工提供强大技术支持[1 - 2] 。
液压系统作为连续混配撬在压裂作业中的液压动力源, 其设计的优劣是关系到液压系统能否可靠工作的关键。液压技术在具有自身不可比拟优势的同时,也有效率较低, 能量消耗大等不可忽视的缺点[3] 。负载敏感系统以其高效、节能的特点被广泛应用于工程机械、矿山机械等行业[4 - 6] 。
本研究运用 AMESim 软件对连续混配撬中负载敏感液压系统进行仿真, 得到不同工况条件下负载敏感泵的流量压力曲线。
1 负载敏感系统结构及原理
负载敏感泵工作压力和流量同时与负载压力和系统所需流量相适应, 又称为功率匹配泵。泵工作压力比负载压力稍高, 泵输出流量根据系统所需流量调节,无溢流损失[7 - 8] 。负载敏感泵原理图如图 1 所示, 该阀组由负载敏感阀芯( LS 阀芯) 和最高压力调节阀芯( PC 阀芯) 以及阀体构成, 调节 LS 调节螺栓则能够调节负载敏感阀的调定压力, 负载敏感阀的弹簧力较小且阀芯位移在调节过程中并不大, 调定 PC 调节螺栓则能够调节最高压力调节阀的调定压力。
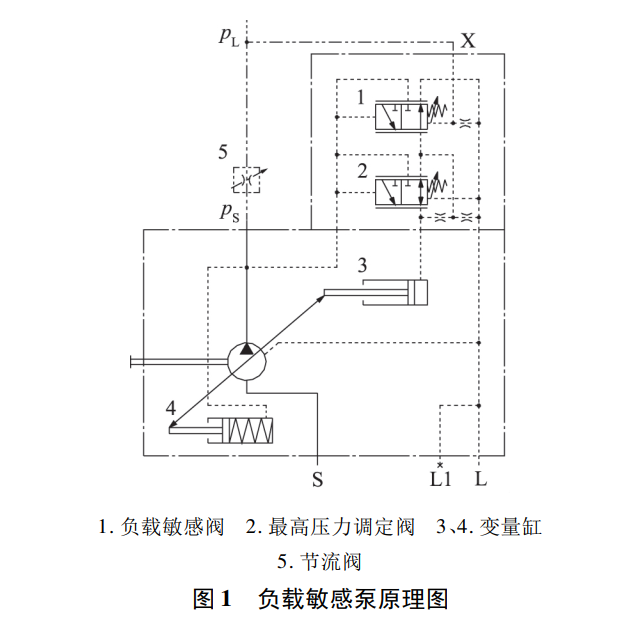
负载敏感阀的调定压力是泵出口压力与 LS 反馈回路压力差 Δp, 通常该压力范围为 1. 5 ~ 2. 5 MPa。
压差 Δp 值小, 则系统压力损失小, 能源利用率高, 但是控制难度大。压差大, 易于控制, 但是压力损失和能耗相应变大。当压差 Δp 恒定时, 负载压力 pL 越大, 液压泵的输出压力 p 也随之变大, 系统效率提高[9] 。
连续混配撬中, 液添泵为清水和粉料的混合物添加杀菌剂、PH 调节剂、黏土稳定剂等液体添加剂, 最 终形成压裂液基液输送给混砂车以配置不同浓度的水基压裂液[10] 。其中, 液添泵共有 4 台, 配有流量 20 ~100 L /min 液添泵 3 台和流量 50 ~ 400 L /min 液添泵 1台。不同工况下, 投入不同数量液添泵, 并且液添泵扭矩也在不断变化。因此, 液压系统中采用负载敏感泵通过负载敏感多路阀带动液压马达转动, 由此驱动液添泵工作。
2 AMESim 模型搭建
AMESim 基于直观的图形界面平台, 提供了一个系统级工程设计的完整平台, 并在此基础上进行仿真计算和深入的分析[11 - 12] 。
2. 1 液添泵液压系统仿真模型的建立
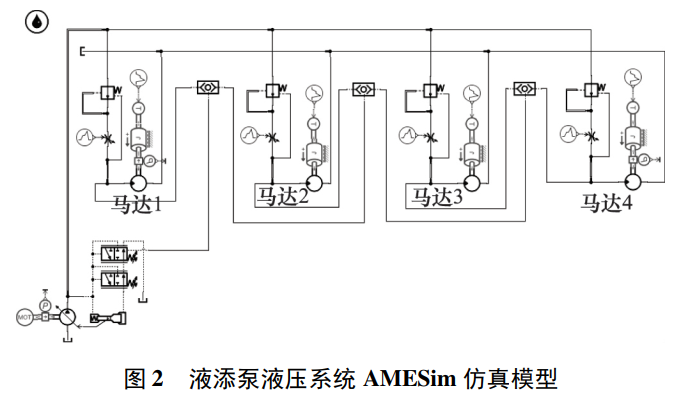
本研究利用 AMESim 仿真软件对液添泵系统进行仿真分析和性能验证。根据液添泵液压系统原理图,考虑到计算效率进行适当简化, 得到 AMESim 仿真模型如图 2 所示。该模型可以通过调节可变节流阀给定信号大小模拟负载敏感多路阀阀口变化, 通过减压阀限定了节流阀进出口压差。
2. 2 仿真参数的设置
根据液添泵液压系统设计计算, 得到 AMESim 仿真模型参数设置如表 1 所示。
液压马达 1 ~ 3 负载转矩为给定阶跃值 261 N·m,液压马达 4 负载转矩为给定阶跃值 278 N·m, 仿真第一阶段仿真时间 30 s, 可变节流阀给定信号为 1, 即阀口全部打开。
3 AMESim 仿真结果分析
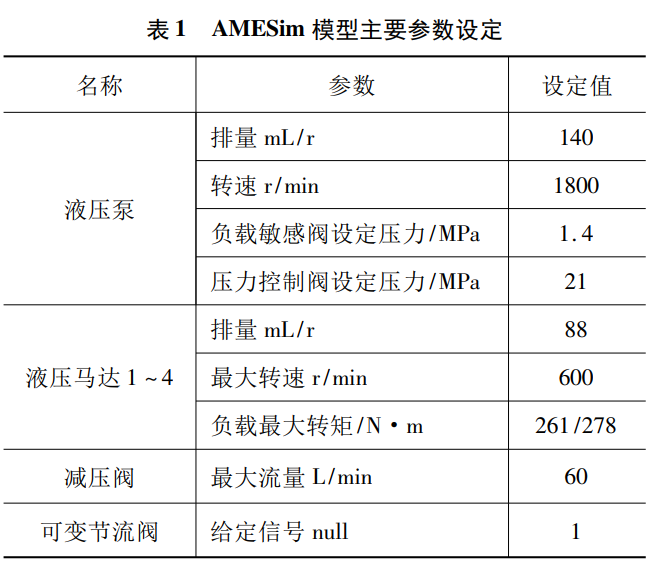
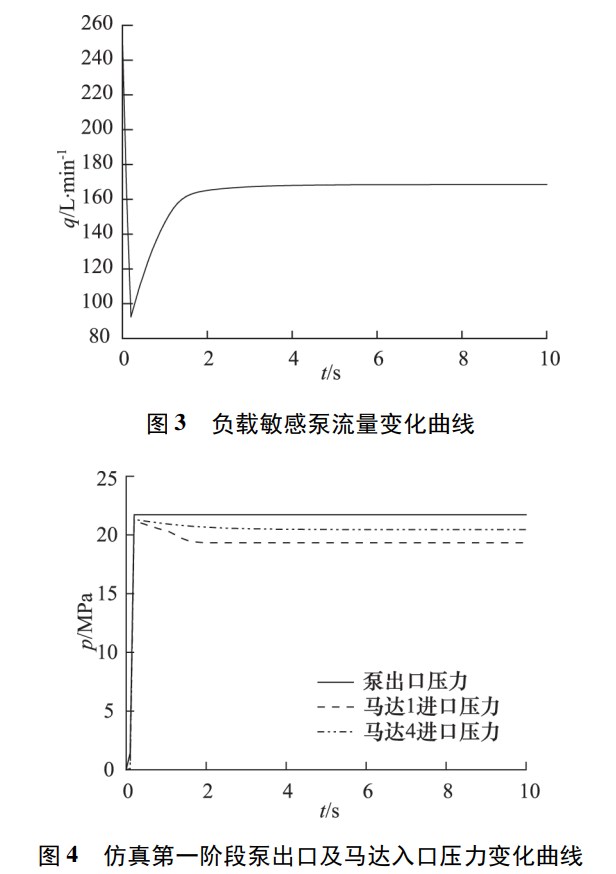
图 3 给出了仿真模型中第一阶段负载敏感泵流量变化曲线, 图 4 给出了第一阶段泵出口及马达入口压力变化曲线。
由图 3 可知, 泵出口流量稳定在 168. 43 L /min。由图 4 可知, 负载敏感泵出口压力为 21. 712 MPa, 液压马达 1( 对应负载为 261 N·m) 进口压力为 19. 334 MPa, 液压马达 4 ( 对应负载为 278 N·m) 进口压力为20. 453 MPa。由于液压马达 4 的负载大于液压马达1 的负载, 液压马达 4 的进口压力大于液压马达 1 的进口压力, 泵出口压力与进口压力较大的马达及液压马达 4( 对应负载为 278 N·m) 的差值约为负载敏感阀的设定压力 1. 4 MPa。
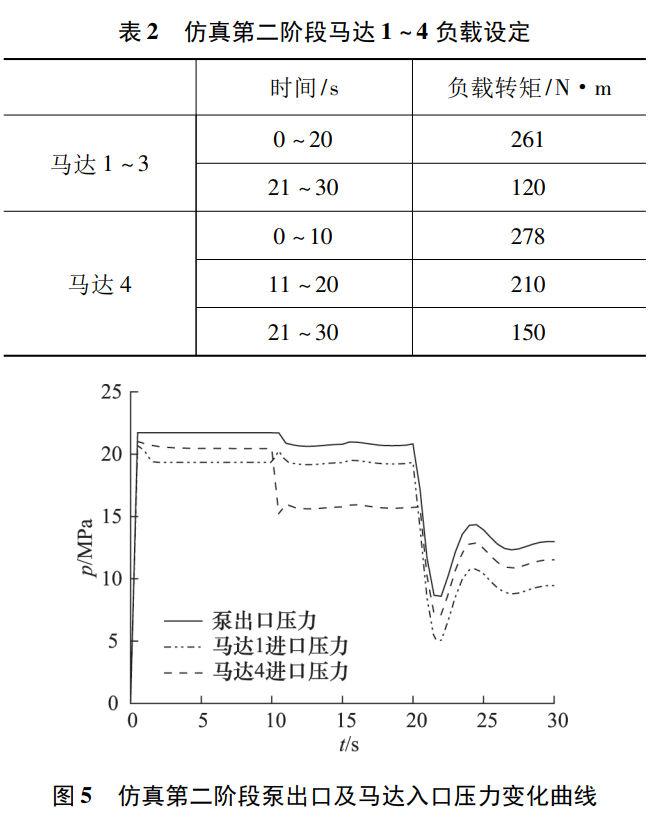
仿真第二阶段, 仿真时间共为 30 s, 马达 1 ~ 4 负 载转矩设置如表 2 所示。得到了第二阶段泵出口及马达入口压力变化曲线如图 5 所示。
由图 5 可知, 在变负载工况下, 泵出口压力随负载转矩变化而实时变化。在 0 ~ 10 s 和 21 ~ 30 s 区间,马达 4 负载转矩大于马达 1 ~ 3 负载转矩, 泵出口压力与马达 4 进口压力保持一定差值( 负载敏感阀设定值) 。在 11 ~ 20 s 区间, 马达 1 ~ 3 负载转矩大于马达4 负载转矩, 泵出口压力与马达 1 ~ 3 进口压力保持一定差值( 负载敏感阀设定值) 。泵出口压力始终随负载较大的马达进口压力变化。
仿真第三阶段, 将第一阶段中液压马达 3、4 所对应的可变节流阀阀口给定信号均减小为 0. 5, 即阀口打开一半, 得到第一、三阶段负载敏感泵流量变化曲线如图 6 所示。仿真发现, 负载敏感泵出口流量稳定在131. 71 L /min, 相比于仿真第一阶段, 负载敏感泵流量减小了 36. 72 L /min。
根据阀口压力流量计算公式:
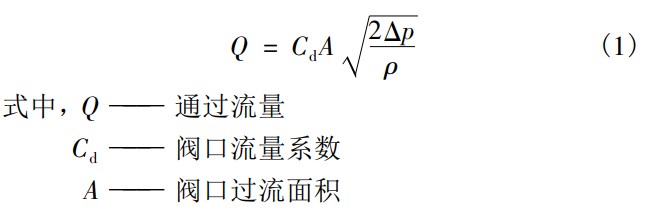
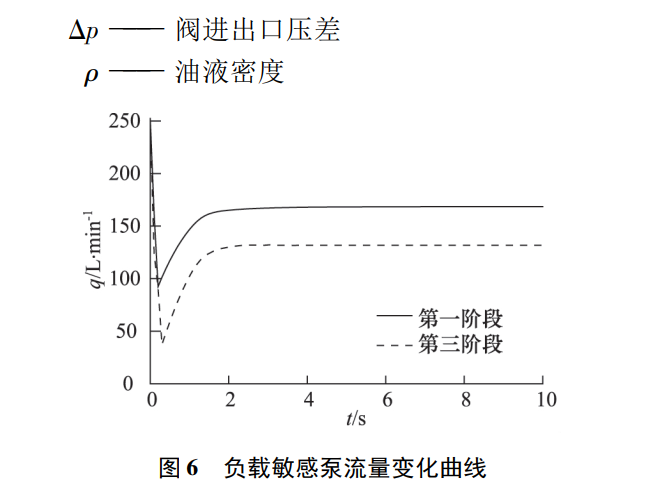
由于液压马达 3、4 对应可变节流阀给定信号减半, 阀口过流面积 A 减小, 而其进出口压差 Δp 由于减压阀的限定保持不变, 因此通过可变节流阀流量减小,即通过负载流量减小。同时因为可变节流阀阀口变小, 如果泵排量保持不变, 则泵出口压力增大, 可变节流阀进出口压差增大, 推动负载敏感阀阀芯向右移动,进而推动斜盘倾角减小, 负载敏感泵排量减小。即负载敏感泵流量与负载所需流量相匹配。
在仿真第二阶段, 根据功率计算公式及功率传感器测得数据, 得到液压泵及马达 1 ~ 4 功率之和对比曲线如图 7 所示。
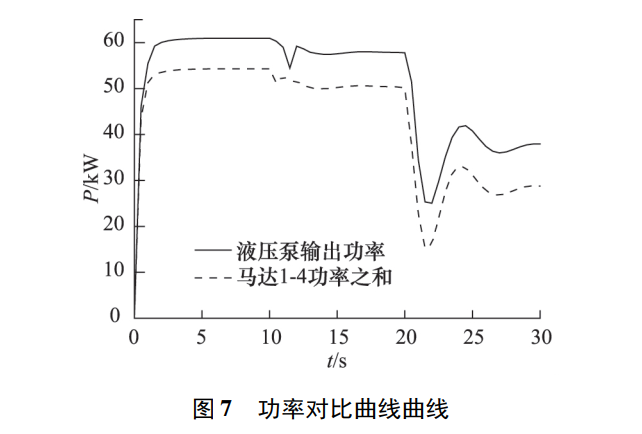
由图 7 可知, 在第 0 ~ 10 s 区间, 液压泵输出功率为 60. 92 kW, 马达 1 ~ 4 输入功率总和为 54. 26 kW,在第 11 ~ 20 s 区间, 液压泵输出功率为 57. 88 kW, 马达 1 ~ 4 输入功率总和为 50. 42 kW, 在第 21 ~ 30 s 区间, 液压泵输出功率为 37. 94 kW, 马达 1 ~ 4 输入功率总和为 28. 49 kW, 液压泵输出功率始终与液压马达所需功率相匹配。
4 结论
本研究通过 AMESim 软件对连续混配撬中液添泵 系统进行仿真, 得到泵出口压力与负载及泵输出流量与负载所需流量变化的曲线。得到结论如下:
( 1) 泵输出流量稳定时, 泵出口压力与各负载中最大压力差值为负载敏感阀的设定压力;
( 2) 流量按需分配, 在泵最大流量允许范围内, 泵输出流量随着负载所需流量的变化而变化, 当负载所需流量减小时, 泵输出流量随之减小, 反之亦然;
( 3) 负载敏感泵输出功率始终与负载所需功率相匹配, 无溢流损失, 达到节能效果。
连续混配撬液添泵液压系统中, 由于负载扭矩不断发生变化, 负载敏感泵的使用, 有效解决了连续混配撬液添泵应用过程中出现的能耗高, 效率低等问题, 液压泵泵输出功率始终与负载所需功率相匹配, 达到节能效果。但在实际使用过程中, 往往因为进口厂商负载敏感泵、负载敏感多路阀价格居高不下, 供货周期长等问题受到限制, 同时国产元件由于加工制造水平有限而可替代性不强, 因此, 液压系统中的关键元件的国产化设计生产成为后续发展进步亟待解决的问题之一。
参考文献:
[1] 廖波兰, 台广锋, 潘社卫, 等. 大排量压裂混配车的研制与工业化应用[J] . 内蒙古石油化工, 2017,( Z1) : 1 - 2.LIAO Bolan, TAI Guangfeng, PAN Shewei, et al. Develo -pment and Industrial Application of Large DisplacementFracturing Mixing Vehicle [J] . Inner Mongolia Petroc -hemical Industry, 2017,( Z1) : 1 - 2.
[2] 张增年, 席仲君, 刘有平, 等. 某车载固压设备车架结构强度及模态分析[J] . 石油机械, 2019, 47( 3) : 68 - 74.ZHANG Zengnian, XI Zhongjun, LIU Youping, et al.Structural Strength and Modal Analysis of a Truck - mountedCementing Equipment Frame [ J] . China MetroleumMachinery, 2019, 47( 3) : 68 - 74.
[3] 黄虎, 陈光柱, 蒋成林. 全液压钻机负载敏感液压系统设计及仿真分析[J] . 液压与气动, 2015,( 3) : 71 - 74.HUANG Hu, CHEN Guangzhu, JIANG Chenglin. TheDesign and Simulation Analysis of Load Sensing HydraulicSystem in Fully Hydraulic Drill [J] . Chinese Hydraulics &Pneumatics, 2015,( 3) : 71 - 74.
[4] 王颖, 吴勇, 徐宝强, 等. 负载敏感液压系统的仿真研究[J] . 煤矿机械, 2015, 36( 11) : 58 - 60.WANG Ying, WU Yong, XU Baoqiang, et al. Simulationand Research of Wheel Loaders Hydraulic Steering Systemwith Load - sensing [J] . Coal Mine Machinery, 2015, 36( 11) : 58 - 60.
[5] 徐志刚. 负载敏感泵控系统流量控制方法研究[J] . 液压与气动, 2014,( 12) : 51 - 54.XU Zhigang. Flow Control Method for Load - sensing PumpControl System [J] . Chinese Hydraulics & Pneumatics,2014,( 12) : 51 - 54.
[6] 王颖, 吴勇, 徐保强. 负载敏感液压系统的仿真研究[J] .煤矿机械, 2015, 36( 11) : 58 - 60.WANG Ying, WU Yong, XU Baoqiang. Simulation andResearch of Wheel Loaders Hydraulic Steering SystemwithLoad - sensing [J] . Coal Mine Machinery, 2015, 36( 11) :58 - 60.
[7] 王伟伟. 负载敏感系统动态特性与节能分析[D] . 秦皇岛: 燕山大学, 2011.WANG Weiwei. Analysis for Dynamic Characteristics andEnergy Saving of Load Sensitive Systems [D] . Qinhuangdao:Yanshan University, 2011.
[8] 陈随英, 赵建军, 毛恩荣, 等. 负载敏感变量泵结构建模与性能分析[J] . 农业工程学报, 2017,( 3) : 48 - 57.CHEN Suiying, ZHAO Jianjun, MAO Enrong, et al.Structural Modeling and Performance Analysis of LoadSensitive Variable Pumps [J] . Transcactions of the ChineseSociety of Agricultural Engineering, 2017,( 3) : 48 - 57.
[9] 景俊华. 负载敏感系统的原理及其应用[J] . 流体传动与控制, 2010, 43( 6) : 21 - 24.JING Junhua. Principle and Application of Load - sensingSystem [J] . Fluid Power Transmission and Control, 2010,43( 6) : 21 - 24.
[10] 刘灼. 大型压裂液连续混配装置的研制与试验[J] . 石油机械, 2017, 45( 7) : 93 - 96.LIU Zhuo. Development and Test of Large Fracturing FluidContinuous Mixing Device [J] . China Metroleum Machinery,2017, 45( 7) : 93 - 96.
[11] 梁全, 苏齐莹. 液压系统 AMESim 计算机仿真指南[M] .北京: 机械工业出版社, 2014.LIANG Quan, SU Qiying. Hydraulic System AMESimComputer Simulation Guide [M] . Beijing: MechanicalIndustry Press, 2014.
[12] 冯婷, 刘文广, 胡显忠. 基于 AMESim 的单泵多执行器负载敏感液压系统仿真分析[J] . 甘肃科学学报, 2017,( 3) : 117 - 120.FENG Ting, LIU Wenguang, HU Xianzhong. SimulationAnalysis of Load Sensitive Hydraulic System of Single Pump& Multiple Actuators Based on AMESim [J] . Journal ofGansu Sciences, 2017,( 3) : 117 - 120.
文章属扬州市白浦江气动件有限公司原创,版权归其所有,转载请注明出处:http://www.zhichenggan.com,欢迎电询本司产品气弹簧│不锈钢气弹簧│压缩气弹簧│可控气弹簧。